
Huang Yu Long
Department: Faculty of Intelligent Science and Engineering
Discipline: Control Science and Engineering
Position: Vice President
Title: Professor
Supervisor qualification: Doctoral supervisor
Master's Advisor
Tel: 15124516030
Fax:
Email: heuedu@163.com
Zip Code: 150001
Address: No. 145, Nantong Street, Nangang District, Harbin City, Heilongjiang Province
Personal profile
Huang Yulong, Professor, doctoral supervisor, Deputy Dean (in charge of scientific research) of School of Intelligent Science and Engineering of Harbin Engineering University, Deputy Director of Heilongjiang Engineering Laboratory of Navigation Instruments. He has been engaged in intelligent information fusion theory and intelligent navigation application research for a long time, published more than 60 SCI papers as the first author or corresponding author, and more than 40 papers in the top IEEE Transactions. He has undertaken or participated in more than 10 projects such as the National Natural Science Foundation of China, Young Talent Promotion Project of China Association for Science and Technology, key projects of Frontier Science Center of the Ministry of Education, and basic projects of National defense technology. Selected in the National Young Talent Program, China Association for Science and Technology Young Talent Lifting Project, Xiangjiang Scholars Program, Heilongjiang Province Upward Good youth, He won the first prize of the Natural Science Award of the Chinese Society of Automation, the Wu Wenjun Award for Outstanding Youth in Artificial Intelligence, the IEEE Barry Carlton Award, the IEEE Barry Carlton Award, and the Excellent Doctoral Dissertation Award of the Chinese Society of Automation. He served as the Chairman of CAA YeS- Intelligent Perception, Navigation and Control Technology Forum for Unmanned Systems, the Chairman of the International Forum on Intelligent Navigation and Advanced Information Integration, and the vice Chairman of the Organizing committee of ICMA 2023 International Conference. Chapter Chairman of ICGNC 2022, IEEE ICRA 2021, CCC 2021, IEEE ICUS 2021, ICCAIS 2021, IEEE SAM 2020, ICASSP 2019, Fusion 2018 and other international academic conferences. At present, he is the deputy editor and editorial board member of international top journals such as IEEE Transactions on Astronautics and Electronics, IEEE Transactions on Instruments and Measurements, IEEE Transactions on Sensors, etc., and the young editorial board member of Acta Automatica Sinica in English, Navigation, Positioning and Timing, Journal of Harbin Engineering University, Unmanned Systems Technology, and Journal of Underwater Unmanned Systems.
Educational experience
From September 2008 to July 2012, he majored in automation at School of Automation, Harbin Engineering University (Chen Geng Experimental Class), and obtained his Bachelor of Engineering degree
From September 2012 to July 2014, majoring in navigation, guidance and control, School of Automation, Harbin Engineering University, studied for a master's degree in engineering
From September 2014 to November 2018, majoring in Control Science and Engineering, School of Automation, Harbin Engineering University, obtained the Doctor degree of Engineering
November 2016 - November 2017, Columbia University, School of Electrical Engineering, Major in Information and Signal Processing, PhD joint training (state-sponsored)
Work experience
December 2021-present, Professor, School of Intelligent Science and Engineering, Harbin Engineering University
June 2022 - present, Doctoral Supervisor, School of Intelligent Science and Engineering, Harbin Engineering University
December 2018 - December 2021, Associate Professor, School of Intelligent Science and Engineering, Harbin Engineering University
June 2019 - now, Master Tutor, School of Intelligent Science and Engineering, Harbin Engineering University
October 2019 - October 2021, Hong Kong Scholar, City University of Hong Kong
June 2019 - December 2021, Postdoctoral Fellow, Harbin Engineering University
Research direction
All-source navigation and positioning, distributed cooperative navigation, Visual inertial navigation, Visual inertial SLAM, intelligent information fusion technology, target tracking, target detection and recognition
Full source navigation and positioning
Background and significance: With the rapid development of information technology, intelligent systems such as drones, unmanned vehicles and underwater robots have an increasing demand for navigation and positioning services. However, in some complex scenarios, the mainstream inertial/satellite integrated navigation system cannot work, which greatly reduces the navigation and positioning accuracy of the intelligent system. In order to provide real-time and accurate navigation and positioning information, the all-source navigation technology that supports sensor plug and play and seamless navigation comes into being. It can provide real-time and accurate navigation and positioning services for intelligent systems in various scenarios, effectively improving the accuracy, reliability, and environmental adaptability of navigation and positioning.


Knowledge system and technology system: inertial navigation, integrated navigation, multi-sensor information fusion, Matlab simulation program design, C++ program design, etc.
Ability training: theoretical analysis ability, algorithm design ability, hardware circuit design ability, software programming ability.
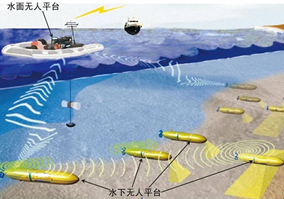
Distributed cooperative navigation
Background and significance: High-precision navigation and positioning is the key of multi-agent system to realize high-precision formation control and cooperative control, and successfully complete the task. However, in GPS-resistant environments such as indoor or underwater, the high cost of traditional high-precision integrated navigation devices limits their ability to be deployed in large areas. In order to realize the high-precision navigation of multi-agent system under the intermittently available or denied GPS environment, distributed cooperative navigation technology came into being, which can greatly reduce the deployment cost of navigation equipment on the premise of ensuring the overall navigation accuracy of multi-agent system, and provide low-cost and reliable high-precision navigation information feedback for formation control and cooperative control of multi-agent system.

Knowledge system and technology system: inertial navigation, integrated navigation, distributed information fusion, wireless/underwater acoustic communication, sensor management, Matlab simulation program design, C++ program design, etc.
Ability training: theoretical analysis ability, algorithm design ability, software programming ability.
Visual inertial navigation and SLAM
Background and significance: With the explosive development of UAV, unmanned vehicle and mobile robot, navigation, positioning and mapping technology has become one of the bottleneck technologies restricting the wide application of unmanned platform. In practical applications, the basic tasks of visual inertial navigation system and visual Inertial SLAM system are real-time and high-precision navigation and positioning of the carrier, mapping and perception of the surrounding environment, obstacle avoidance and path planning in complex environments. However, scale uncertainty, motion ambiguity and multi-sensor spatiotemporal alignment in monocular vision pose great challenges to visual inertial navigation systems and visual inertial SLAM systems.
Knowledge system and technology system: inertial navigation, visual geometry, image processing, integrated navigation, multi-sensor information fusion, SLAM, C++ programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, hardware circuit design ability, software programming ability.
Intelligent information fusion technology
Background and significance: Information fusion technology is an important research branch of information science. It includes the process of collection, transmission, collection, analysis and synthesis of various intelligence information obtained by multi-type, multi-source and multi-platform sensors, and constantly revises the required information to improve the estimation results. Information fusion technology has been widely used in inertial navigation, integrated navigation, target tracking, automatic control, SLAM and other fields. Nowadays, with the rapid development of information technology, many engineering applications in complex scenarios require information fusion methods to have the characteristics of robustness to interference, environmental adaptability, distribution, and intelligent fault tolerance. The research of intelligent information fusion technology will inject original blood into many industries in the information field.


Knowledge system and technology system: optimal state estimation, multi-source information fusion theory, Bayesian statistics, matrix analysis, modern cybernetics, Matlab programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, software programming ability.
Target tracking
Background and significance: With the rapid development of intelligent information technology, the application of intelligent unmanned systems such as drones, unmanned vehicles and underwater robots has been paid more and more attention. In practical applications, accurate, continuous and fast tracking of the target is the basis for the unmanned system to interact with the external environment and then complete the task. However, the problems of data association uncertainty, noise, false alarm, time-varying number of targets, target occlusion, etc. cause great challenges to target tracking. It is of great significance to study a new target tracking algorithm to effectively deal with the above problems for unmanned systems to improve tracking accuracy and reliability and enhance the ability of environment interaction.
Knowledge system and technology system: pattern recognition, SLAM, optimal state estimation, Bayesian statistics, stochastic finite set theory, Matlab simulation programming, C++ programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, software programming ability.
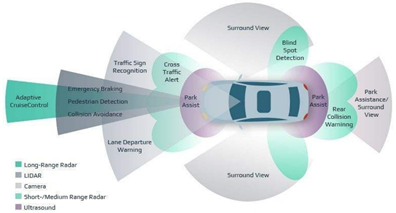
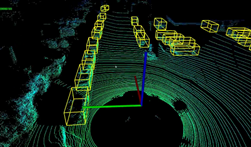
Target detection and recognition
Background and significance: With the development of information technology and sensor technology, vehicle autonomous driving, robot environment perception, video surveillance, intelligent transportation and other intelligent perception fields have a wide range of requirements for object detection and recognition. However, target detection and recognition are faced with the challenge of improving and optimizing the performance of mainstream algorithms, improving the detection accuracy of small targets, realizing multi-class object detection, lightweight algorithms, adapting to specific scenarios and other key technologies. It is of great significance to study the new target detection and recognition algorithm which effectively deal with the above problems to improve the accuracy of target detection and recognition in the field of intelligent perception.


Knowledge and technology: Pattern recognition, machine learning, computer vision, python programming, linux operating system, neural network framework.
Ability training: theoretical analysis ability, algorithm design ability, hardware circuit design ability, software programming ability.
Undertake a project
National project:
Research on outliers Robust state estimation based on statistical similarity, National Natural Science Foundation of China Youth Foundation, 2020-01 to 2022-12, Source: National Natural Science Foundation of China (in Progress)
Autonomous Navigation Technology of Far-reaching Sea AUV Cluster, Young Talent Lift Project, 2020-01 to 2022-12, Source: China Association for Science and Technology (hosted, in research)

Gaze Tracking for robotic arm Control: Calibration, Gaze Point Estimation and Tracking, Xiangjiang Scholars Support Project, 2019-10 to 2021-10, Source: National Postdoctoral Administrative Committee (Chair, Research in Progress)
Research on a New method of Underwater AUV navigation Filtering based on Thick Tail non-Gaussian Noise Modeling, National Natural Science Foundation of China, 2018-01 to 2021-12, Source: National Natural Science Foundation of China (Technical Director, Research)
Provincial and ministerial projects:
Horizontal level projects:
Airborne All-Source Positioning Technology, Horizontal Project, 2021-05 to 2022-12 Source: The Tenth Research Institute of China Electronics Technology Group Corporation (chaired, in research)
Multi-source Intelligent Navigation and Seamless Positioning Technology for Spacecraft, Horizontal Project, 2021-06 to 2023-06 Source: Institute of Marine Launch Vehicle Navigation Equipment, Harbin Engineering University (in research)
Research on Distributed optimal Information fusion method considering the incompleteness of inter-satellite Communication Networks, Horizontal Project, 2022-01 to 2023-06 Source: School of Aerospace Science, National University of Defense Technology (in Research)
School level Projects:
Distributed Collaborative navigation of underwater AUV Cluster based on Factor Map Fusion, for Academic Frontier Support Program (Key Project), 2021-01 to 2022-12, Source: Special Fund for Basic Scientific Research Business Expenses of Central Universities (hosted, in research)
Research on AUV high-precision navigation Filtering Method based on Statistical similarity Learning, Free Exploration Support Program, 2020-01 to 2020-12, Source: Central University Basic Research Funds (hosted, concluded)
Research on outliers Robust state Estimation Method Based on Statistical similarity, New Teacher Cultivation Fund, 2019-01 to 2019-12, Source: Central University Basic Research Funds (chaired, closed)
Academic exchange
Special Sessions:
Chairman of the First Hong Kong and Macao Doctoral Academic Exchange Conference of Chinese Association of Automation (2023.06.17)
CAA YeS- Chairman of the Intelligent Perception, Navigation and Control Technology Forum for Unmanned Systems (2021.07.17)
Chairman of the International Forum on Intelligent Navigation and Advanced Information Integration (2021.01)
International Conference on Guidance, navigation and control 2022 (ICGNC 2022) Session: "Intelligent navigation and control" (Session Chair)
2021 IEEE International Conference on Robotics and Automation (IEEE ICRA 2021) Topic: "Visual-Inertial Navigation Systems" (Program Committee member)
40th China Control Conference (CCC 2021) : Advances in Intelligent Control Technology and Autonomous Systems for Energy Internet (as Co-Chair)
4th IEEE International Conference on Unmanned Systems (IEEE ICUS 2021) Topic: "Intelligent Navigation and Advanced Information Fusion Technology" (Co-Chair)
10th International Conference on Computer Applications and Information Science (ICCAIS 2021) "Advanced Multi-Sensor Data Fusion Technologies for Navigation and Localization" (Chair)
11th International Conference on Sensor Arrays and MultiChannel Signal Processing (IEEE SAM 2020) : "Multi-Sensor Data Fusion for Underwater Applications" (Chair)
41st International Conference on Acoustics, Speech and Signal Processing (ICASSP 2019) Topic "Emerging Methods for Multi-sensor Data Fusion and Tracking" (Co-Chair)
"Multi-Sensor Data Fusion for Navigation and Localisation", theme of the 21st International Conference on Information Integration (Fusion 2018) (Co-Chair)
Attend meetings:
CCC 2021
ICASSP 2019
Fusion 2018
ICASSP 2016, Fusion 2016
IEEE CDC 2015
Academic Lectures:
Navigation and Positioning Young Scholars Forum, 2023.06
Institute of System Systems, Chinese Academy of Sciences, Xue Wenchao, 2023.05
CPS Special Topic of China Control and Decision Conference, 2023.05
12 Institute of Aerospace Science, Miao Zhiyong, 2020.01
School of Automation, Beihang University, Guo Lei, 2020.01
2019 Xiangjiang Scholars Annual Conference, Sun Yat-sen University, 2019.11
School of Automation, Nanjing University of Science and Technology, Wu Panlong, 2019.10
School of Internet of Things Engineering, Hohai University, Liu Xiaofeng, 2019.10
Expert Report of ICCSS 2019 Conference, Wang Shiyuan, 2019.09
School of Mathematics, Sichuan University, Shen Xiaojing, 2019.09
School of Aeronautics and Astronautics, University of Electronic Science and Technology of China, Zhou Zebo, 2019.09
School of Automation, University of Electronic Science and Technology of China, Li Rui, 2019.09
School of Mechanical and Electrical Engineering, Southwest Petroleum University, Lai Xin, 2019.09
College of Aerospace Science and Engineering, National University of Defense Technology, Wang Yidi, 2019.01
College of Intelligent Science, National University of Defense Technology, Wu Wenqi, 2019.01
School of Electrical Engineering, North China University of Technology, Du Tao, 2018.12
School of Information and Communication Engineering, Harbin Engineering University, Li Yingsong, 2018.10
School of Underwater Acoustics, Harbin Engineering University, Yin Jingwei, 2018.05
Department of Automation, Naval University of Engineering, Chang Lubin, 2017.12
School of Instrument Science and Engineering, Southeast University, Liu Xixiang, 2017.12


 中文
中文