
Xu Bo
Department: Faculty of Intelligent Science and Engineering
Discipline: Control Science and Engineering
Position:
Title: Professor
Supervisor qualification: Doctoral supervisor
Master's Advisor
Phone: 82518714
Fax: 82518741
Email: xubocarter@sina.com
Zip Code: 150001
Address: Building 61, Harbin Engineering University
Personal profile
Xu Bo, Member of the Communist Party of China, professor/doctoral supervisor, Deputy director of the Navigation Institute, key member of the Engineering Research Center of the Ministry of Education of Navigation Instruments. Adhere to the combination of basic research, equipment pre-research and engineering development, long-term engaged in inertial navigation, multi-agent cooperative control, multi-sensor intelligent information fusion research work. He is the editorial board member/youth editorial board member of several periodicals such as Unmanned System Technology and Navigation, Positioning and Timing, and the thesis review expert of the Degree and Graduate Education Development Center of the Ministry of Education. So far, it has undertaken or participated in more than 20 projects such as key projects of the National Natural Science Foundation, Field Fund of the Ministry of Equipment Development, National Key Laboratory Fund, Provincial Natural Science Fund, HJ equipment advance research, and basic frontier research of the Bureau of Science, Technology and Industry. One academic monograph was published as the first completed person (funded by the National Defense Publishing Fund), and five academic translations were published as the first/second completed person. As first author or corresponding author (second author) in IEEE Transactions, Ocean Engineering, Journal of Navigation, Journal of Science Sensors, Measurement, Neurocomputing, IEEE Sensors Journal, IET Radar, Sonar & Navigation, Measurement Science and Technology He has published more than 50 academic papers in important domestic and foreign academic journals and conferences such as Technology, Acta Automatica Sinica, Control and Decision, among which one paper won the Best paper of 2020 in a Chinese core journal, and one paper won the Excellent paper of the Year of 2021 by the Chinese Society of Navigation. One paper won the excellent paper of China Society of Naval Architecture in 2021. The first consummated person has been authorized 22 invention patents, 4 international patents and 4 software Copyrights. One of the patents won the 18th China Patent Award (once advertised on the official website of the Ministry of Industry and Information Technology). In addition, he has won the China Navigation Youth Science and Technology Award, the second prize of technical invention of the China Navigation Society (ranked first), the second prize of provincial and ministerial science and technology progress, and the second prize of natural science of Heilongjiang Province. The undergraduate course "Modern Control Theory" was selected as the university-level brand course in 2018, the provincial-level quality online course in 2019 and the online and offline hybrid brand course in 2020. The graduate course "Linear System Theory" is a quality course at the university level.
Educational experience
[1] 2011.12-2015.08, Control Theory and Control Engineering, Harbin Engineering University, Postdoctoral Fellow
[2] 2007.09 -- 2011.03, Harbin Engineering University, Precision Instrument and Machinery, Doctor of Engineering
[3] 2004.09 -- 2007.03, Harbin Engineering University, Master of Engineering in Control Theory and Control Engineering
[4] 2002.11-2003.11, Tokyo University of Electric Communication, Electrical Communication Engineering, Bachelor of Engineering
[5] 2000.09 -- 2004.07, Harbin Engineering University, Electrical Engineering and Automation, Bachelor of Engineering
Work experience
[1] 2021.06-present, Professor, School of Intelligence, Harbin Engineering University
[2] 2016.09-present, School of Automation, Harbin Engineering University, doctoral supervisor
[3] 2015.09-2021.08, Associate Professor, School of Automation, Harbin Engineering University
[4] 2009.04-2015.08, School of Automation, Harbin Engineering University, Lecturer
Research direction
Inertial system algorithm/inertial base integrated navigation
Background and significance: Inertial navigation system relies on its own equipment to navigate independently, independent of external information, has the advantages of good concealment, work is not affected by meteorological conditions and human interference, and occupies a very important position in national defense equipment technology. At the same time, inertial navigation system has become the basis of various integrated navigation systems with its advantages of rich navigation parameters, such as inertial/Doppler Log, inertial/global positioning system and so on. Inertial and inertia-based integrated navigation systems have been gradually extended to aerospace, aviation, navigation, petroleum development, geodesy, ocean survey, geological drilling control, robotics and railway and other fields. With the emergence of new inertial sensitive devices, they have been applied in the automotive industry and medical electronic equipment. It is also increasingly showing its huge role in various fields of the national economy.


Knowledge and technology system: inertial navigation, integrated navigation, multi-sensor information fusion, Matlab/C++ programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, hardware circuit design ability, software programming ability.
Training characteristics and advantages: school-enterprise cooperation, close combination of naval equipment, theoretical algorithm, simulation analysis and practical verification.
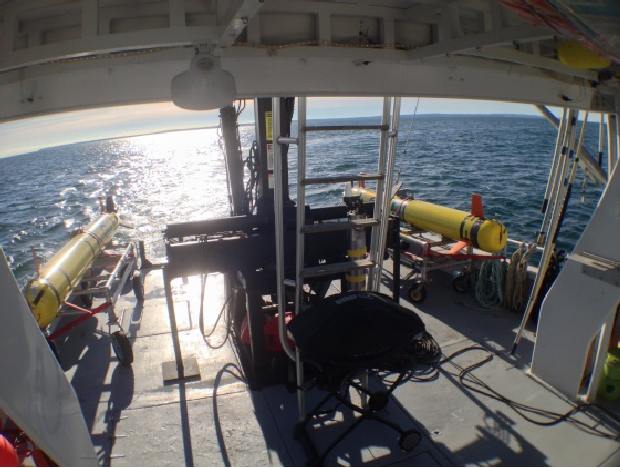
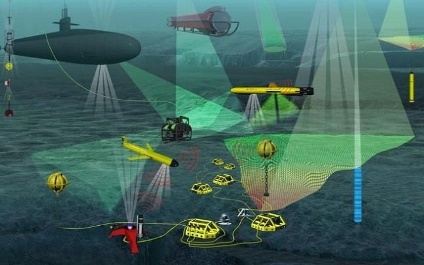
Multi-robot cooperative navigation and formation control
Background and significance: Underwater robot is an important carrier platform for human to explore the ocean and defend national defense security. However, with the deepening of human ocean exploration activities, single robot is weak in the face of large-scale and efficient task requirements, so researchers focus on the collaborative system composed of multiple robots. High-precision navigation positioning and formation control are important technical guarantees for multi-robot cooperation to complete tasks. The high performance controller design can make the robot formation cooperate to execute the task according to the required formation form, which has rich development prospects in both civil and military fields. As one of the most promising underwater navigation methods, cooperative navigation has the advantages of whole sea navigation, low cost and high precision, and is suitable for underwater multi-robot formation cooperation system.
Knowledge system and technology system: inertial navigation, integrated navigation, multi-sensor information fusion, electromagnetic/underwater acoustic communication, fault diagnosis, artificial neural network algorithm, cooperative control, bionic optimization algorithm design, Matlab simulation program design, C++ program design, etc.
Ability training: system scheme design ability, theoretical analysis ability, algorithm research ability, software programming ability.
Training features and advantages: diversified development of professional skills, close combination of national projects, combination of theoretical analysis and experimental verification, the laboratory has many years of rich research foundation.
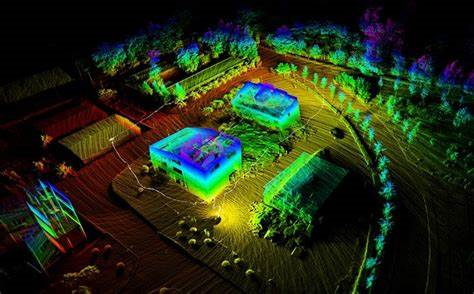
Visual inertia SLAM
Background and significance: Autonomous driving technology is an intelligent technology that relies on the cooperation of artificial intelligence, visual computing, radar, monitoring devices and global positioning system, so that computers can automatically and safely operate motor vehicles without any human active operation. It is mainly composed of environmental perception, behavioral decision-making and vehicle control systems. The technologies involved include decision algorithm, path planning, multi-sensor fusion, machine vision, natural language processing, etc., which is a cutting-edge technology with multiple disciplines and cross-cutting technologies. The most important significance of the research on autonomous driving at this stage is to solve the safety and efficiency problems of transportation. SLAM is a synchronous positioning and map construction technology, which is mainly used in robots, drones, autonomous vehicles, augmented reality, three-dimensional reconstruction, etc. At this stage, SLAM technology, especially visual SLAM, is not perfect, and there are still a lot of challenges in emerging directions such as visual-inertial SLAM and semantic SLAM.

Knowledge technology system: multi-sensor information fusion, inertial navigation technology, computer vision, machine learning, SLAM, etc.
Ability training: theoretical analysis ability, algorithm design ability, software programming ability.
Training features and advantages: school-enterprise cooperation, the combination of theoretical algorithms, simulation analysis and experimental verification.
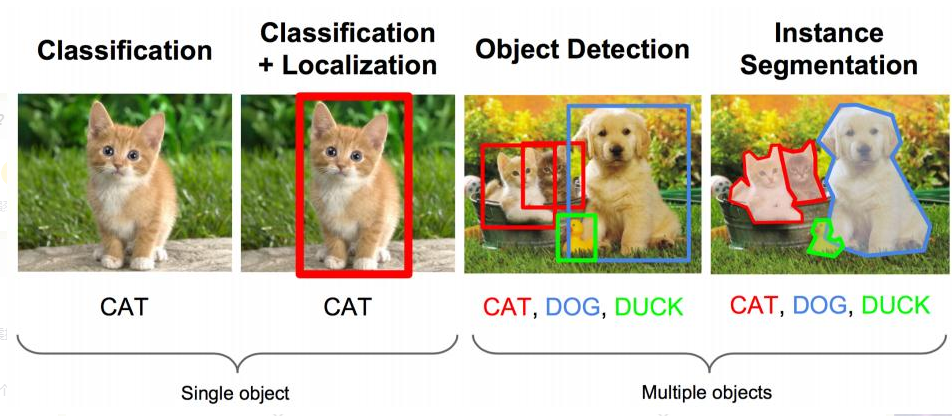
Object detection and intelligent recognition
Background and significance: Target recognition and location are the main research issues in the field of computer vision. Image segmentation, target tracking, target behavior analysis, etc. are all based on target detection in images. This technology is widely used in robot navigation, intelligent video surveillance, industrial inspection and other fields. With the development of deep learning technology, object detection algorithm has made a great breakthrough. However, in some complex scenes or cases containing small targets, the existing mainstream target detection algorithms still have some limitations in real-time and accuracy. How to improve detection efficiency, ensure detection accuracy and achieve algorithm lightweight is a hot issue at this stage.
Knowledge and technology system: neural network construction, target detection and recognition, deep learning framework application, python programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, algorithm optimization and improvement ability, software programming ability.
Training features and advantages: school-enterprise cooperation, combined with the Marine field, theoretical algorithms.
Deep learning and intelligent algorithms
Background and significance: Deep learning is the mainstream technology of artificial intelligence from concept to prosperity. It has become an indispensable method for mobile robots, face recognition, object detection, autonomous driving, smart home and other applications, and methods based on deep learning have approached or even exceeded human levels in accuracy. It is of great significance to study the intelligent algorithm of deep learning to improve the detection and recognition accuracy of objects in intelligent perception field. Combine intelligent algorithms with navigation to stay on top of research.

Knowledge and technology system: neural network, digital image processing, target recognition and tracking, image segmentation, visual navigation, automatic driving, python programming, etc.
Ability training: theoretical analysis ability, algorithm design ability, software programming ability.
Training characteristics and advantages: school-enterprise cooperation, the combination of theoretical algorithms, simulation analysis and experimental verification, closely follow the national requirements for the development of artificial intelligence strategy, docking the needs of enterprises. Lay the foundation for future employment and further study.
Undertake a project
Relying on the "Advanced Ship Navigation and Mapping Technology" Xinghai academic team, based on the inertial system algorithm/inertial based integrated navigation, multi-robot cooperative navigation and formation control, visual inertial SLAM, target detection and intelligent recognition and other scientific research directions, as the project leader or core technical backbone, Presided over/undertook more than 10 projects such as the National Natural Science Foundation, national major science and technology projects, and pre-research projects of high-tech ships and equipment of the Ministry of Industry and Information Technology; At present, he has presided over/participated in 10 projects of National Natural Science Foundation, international cooperation projects, model development, equipment pre-research, Natural Science Foundation of Heilongjiang Province, central University Fund, etc. His scientific research achievements have won 1 second prize of Natural Science of Heilongjiang Province, 1 second Prize of Science and Technology Progress of the Chinese People's Liberation Army, and 1 China Patent Award. He has published 6 works, more than 50 academic papers, and authorized 22 national invention patents.
Academic exchange
(1) Attended high-level international academic conferences in the United States, Japan, Germany and other places for many times, and preached papers.
(2) Has established long-term cooperation with the Institute of Automation of the Chinese Academy of Sciences in the direction of robot intelligent systems, and has jointly trained a doctor;
(3) Has established long-term cooperation with CSSC in the navigation control theory of aircraft, and has jointly trained 2 masters;


 中文
中文